Capítulo 3.9
Seguridad robótica: de las “jaulas” a los “cobots”
A continuación, resumimos la información más importante sobre conceptos de seguridad para su aplicación robótica. Aprenda a prevenir el acceso a peligros, limitar el movimiento del robot y garantizar una interacción segura entre humanos y robots. Descubra la importancia de las vallas de seguridad, los sistemas de detección avanzados y la importancia de planificar espacios de trabajo colaborativos.
Normas y reglas esenciales para la seguridad de los robots
Los robots son increíblemente versátiles y ofrecen soluciones de automatización económicas. Sin embargo, también pueden ser bastante peligrosos.
Los robots grandes y de alta velocidad, en particular, pueden causar lesiones muy graves por aplastamiento e impacto. Por ello, la seguridad de los robots se ha estandarizado a nivel internacional en las normas (EN) ISO 10218-1 y -2, y para EE. UU. en la prácticamente idéntica norma ANSI/RIA R15.06. Además, se ha publicado una norma para robots móviles con ANSI/RIA R15.08.
La seguridad del robot se basa en tres elementos::
- Impedir el acceso de personas
- Limitar el movimiento del robot
- Hacer que el contacto físico sea seguro
El tercer elemento, la seguridad del contacto físico, es un concepto relativamente nuevo, a menudo denominado operación robótica colaborativa. Implica que un sistema robótico especialmente diseñado y un operador trabajan en el mismo espacio de trabajo o en espacios de trabajo superpuestos. Primero, se debe planificar el espacio de trabajo colaborativo y la interacción deseada entre humanos y robots. A continuación, se identifican los riesgos y se implementan las medidas de seguridad adecuadas.
¿Qué es un “robot colaborativo”?
La medida de seguridad más avanzada es el uso de un robot colaborativo, a veces denominado “cobot”.
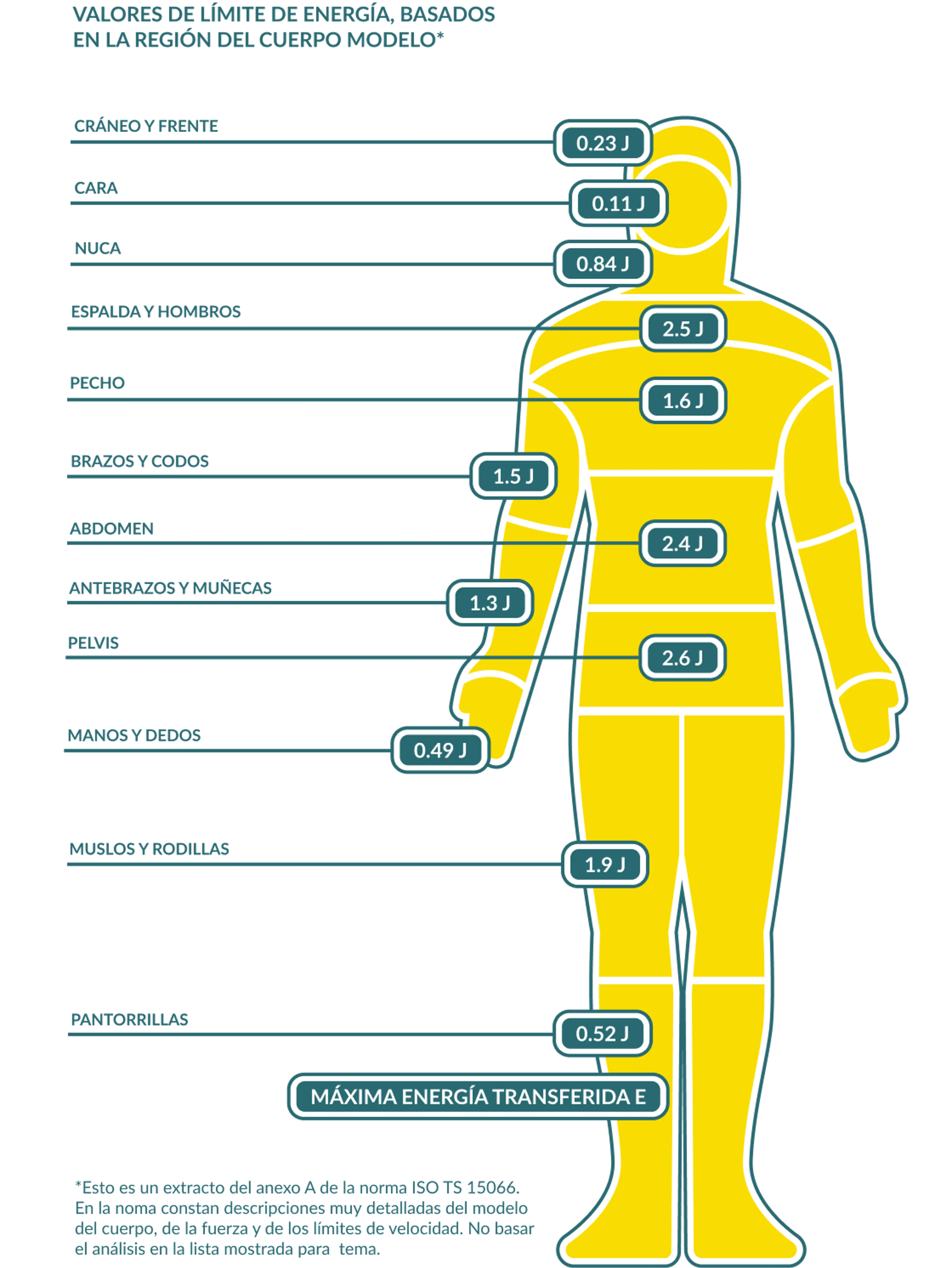
Un robot colaborativo opera con una fuerza y una velocidad limitadas. Los humanos que se encuentren con un robot colaborativo en movimiento no sufrirán daño, aunque pueden sentir algo de dolor. Años de pruebas exhaustivas han dado como resultado una lista de límites de fuerza, velocidad y energía que los humanos pueden soportar cuando están sujetos al contacto físico con elementos de la máquina (consulte la norma ISO TS 15066).
Los robots colaborativos que se mueven dentro de estos límites pueden considerarse seguros para la interacción entre humanos y robots. Sin embargo, eso no significa que dichas aplicaciones sean automáticamente seguras. Se debe considerar cuidadosamente todo el contexto del robot y la herramienta que maneja (el efector final).
Ejemplo:
- Imagínate sentado junto a un robot que maneja una jeringa con líquido venenoso. La velocidad y la fuerza de sus movimientos pasan de repente a un segundo plano.
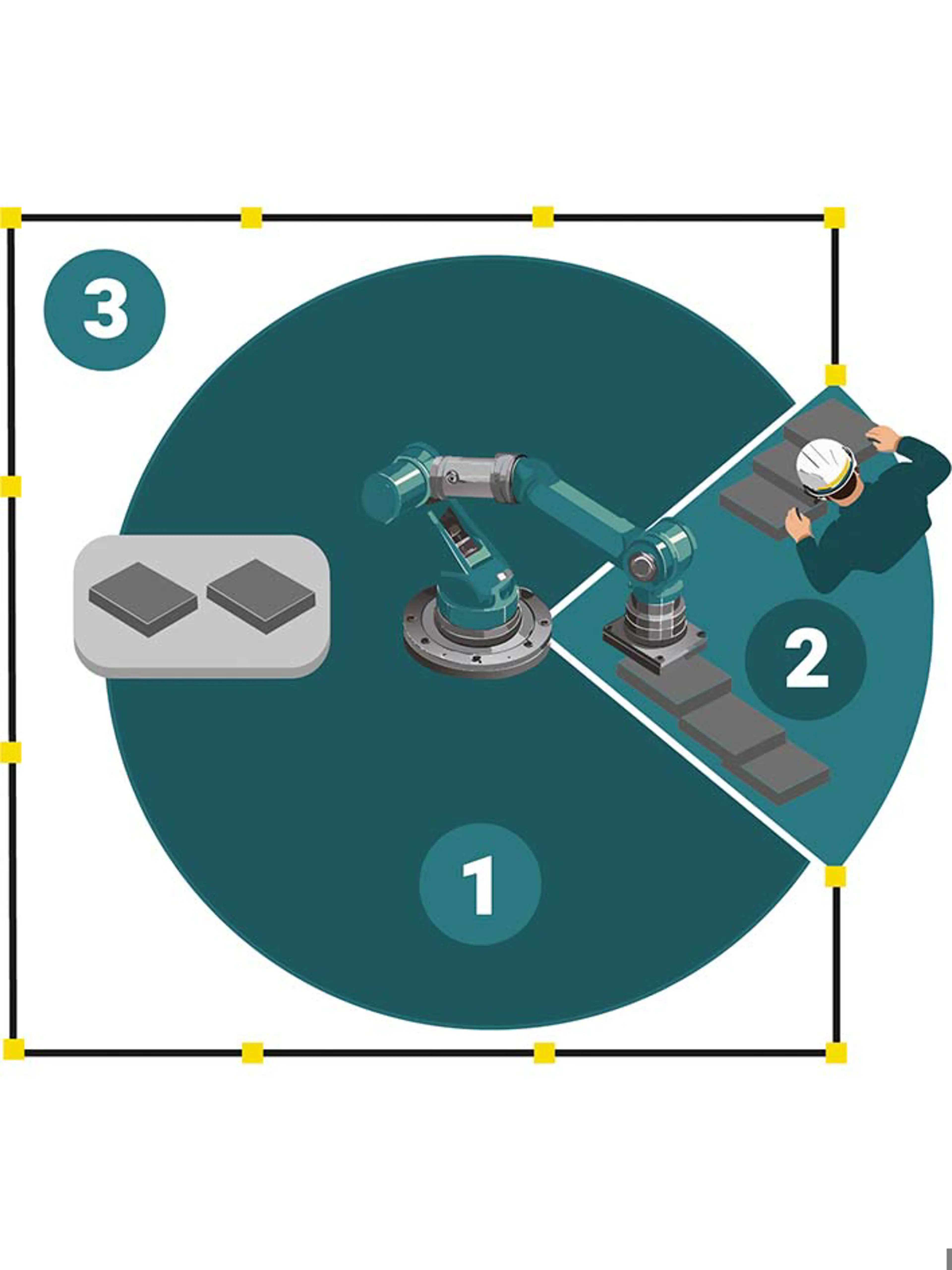
Seguridad en espacios de trabajo colaborativos
En los gráficos, un operador humano y un robot comparten el espacio de trabajo colaborativo.
Medidas de seguridad:
- Un robot peligroso no debe moverse en el área colaborativa si hay una persona presente.
- Dependiendo de la distancia y la velocidad de movimiento de la persona, el robot puede tener que reducir la velocidad y detenerse a medida que la persona se acerca.
Vallado de seguridad:
- Las cercas de seguridad siguen siendo necesarias hoy en día en algunas aplicaciones colaborativas y seguirán siéndolo en el futuro.
- Las vallas adquieren nuevas funciones, como la de delimitar un área de colaboración de los espacios de trabajo y pasillos habituales..
Aplicaciones de picking robótico
Cada vez se emplean más robots para recoger y colocar productos y paquetes con el fin de completar pedidos.
La paletización ha sido, desde hace tiempo, una aplicación habitual para robots de tamaño medio y grande. Más recientemente, se utilizan robots más pequeños en aplicaciones colaborativas de recogida y colocación dentro de esquemas de preparación de pedidos tipo “goods-to-person”. Estos robots pueden interactuar directamente con las personas, ya que se desplazan a baja velocidad y con poca fuerza.
Riesgos derivados del picking robótico y medidas de seguridad eficaces:
-
Interacción de robots con sistemas de transporte y estaciones de embalaje: puede generar riesgos de atrapamiento y cizallamiento. Algunas herramientas robóticas también pueden presentar peligros.
Medidas de seguridad: aunque el riesgo de lesiones es bajo, puede resultar conveniente instalar vallados de protección bajos para mantener a las personas alejadas de estas zonas de riesgo. -
Entrada innecesaria de personas en un “espacio colaborativo”: pueden resultar heridas por un movimiento inesperado del robot. Además, su presencia puede provocar paradas frecuentes del robot, interfiriendo así en la eficiencia de la operación.
Medidas de seguridad: instalar vallados bajos, barreras peatonales o barreras de “advertencia” más bajas que alerten a las personas sobre las áreas en las que no deben entrar, y definir claramente desde qué lado deben acceder los trabajadores al espacio colaborativo.
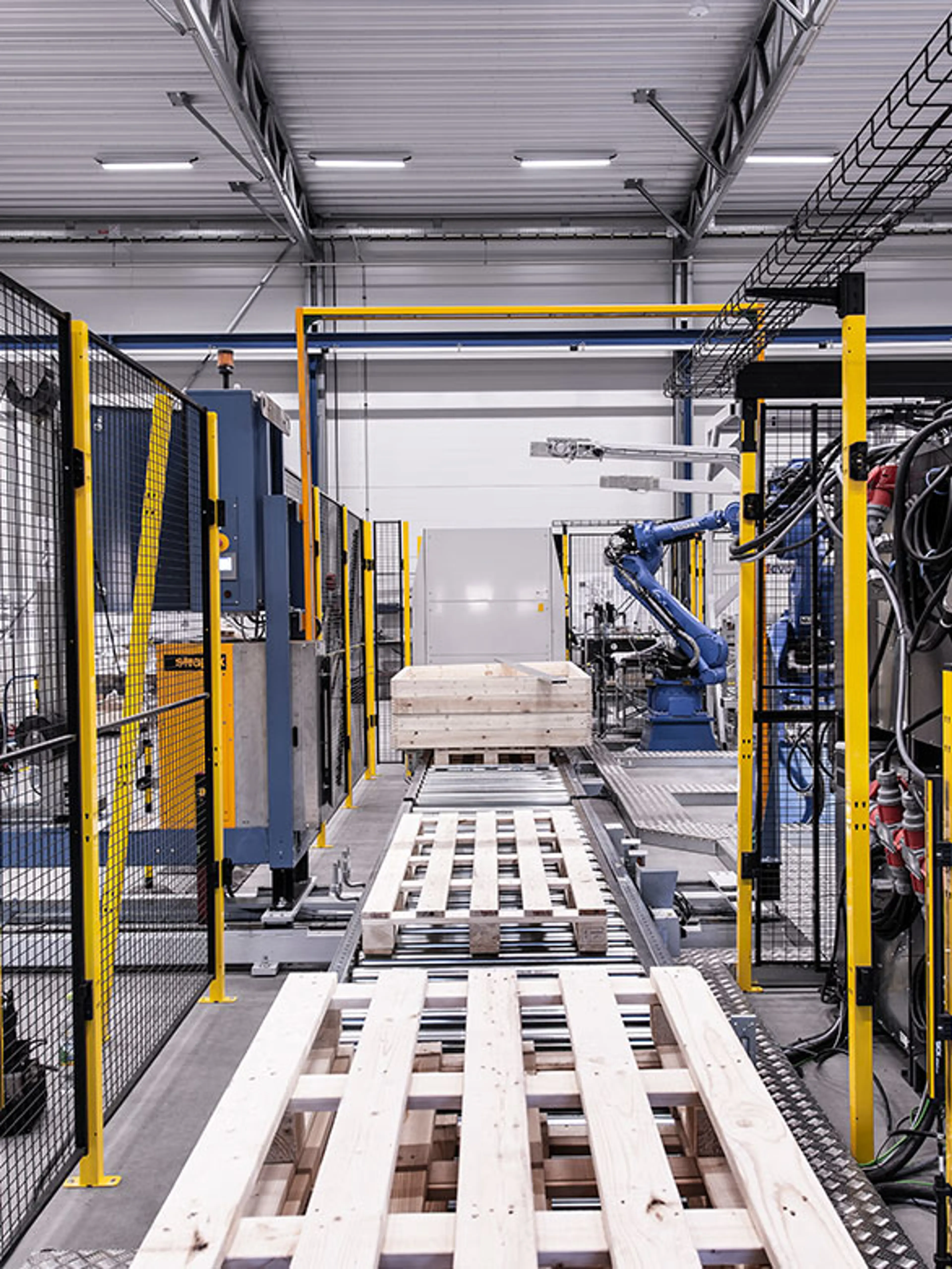
Seguridad de los robots industriales
La seguridad de los robots depende en gran medida de "celdas" cerradas con vallas y puertas de acceso. Pero en muchas aplicaciones se necesitan sistemas de monitorización adicionales o incluso pueden sustituir a la "jaula" del robot.
Sistemas de detección avanzados:
- En muchas celdas robóticas, se utiliza una combinación de vallas de seguridad con puertas, barreras de luz y escáneres de rango.
- El sistema de detección más avanzado es una cámara 3D. Debe instalarse a una altura suficiente sobre el espacio de trabajo para garantizar que “ve” todas las áreas en las que pueden moverse las personas.
Ten cuidado con las personas que permanecen dentro de la zona de peligro detrás de los dispositivos de detección. Si eso es posible, podrían ser necesarias medidas de seguridad adicionales.

Espacios seguros para robots
Se puede utilizar un vallado para crear un “espacio protegido”, pero normalmente no debe utilizarse para definir el “espacio limitado”.
Los robots que chocan con las vallas a alta velocidad o con mucha fuerza pueden causar deformaciones, incluso en vallas robustas, lo que supone un riesgo potencial para la seguridad. Además, las vallas pueden permitir que las personas introduzcan los dedos por las aberturas, lo que aumenta el riesgo de lesiones. Para mitigar estos problemas, se debe mantener una distancia mínima de 120 a 200 mm entre el espacio limitado y el borde exterior de la valla. Para más información sobre cómo calcular y determinar la altura y la distancia adecuadas de las vallas de protección, consulte el capítulo 3.2 «Selección de las protecciones de la maquinaria»
Por lo tanto, confiar únicamente en las llamadas vallas "a prueba de robots" no es suficiente. En su lugar, se deben implementar dispositivos de limitación adecuados para garantizar la seguridad, como:
- Software de control de movimiento con clasificación de seguridad (conforme al menos a PL = d según (EN) ISO 13849-1 o SIL 2 según (EN) IEC 62061)
- Mecanismos limitadores de espacio o topes físicos (por ejemplo, topes y pasadores)
- Dispositivos limitadores externos (por ejemplo, topes mecánicos o interruptores de proximidad)
La valla está diseñada para mantener a la gente afuera, no al robot adentro.

Vallas “seguras para robots”: ¿correcto?
Muchas personas piden vallas “seguras para robots” o señalan los resultados de pruebas de los fabricantes de cercas que muestran una resistencia al impacto de 2000 julios o más.
La pregunta en sí misma revela una idea errónea sobre la seguridad de los robots. Las normas de seguridad exigen que su movimiento se limite por medios distintos a vallas u otras medidas de seguridad.
El rango de movimiento de un robot depende de su tamaño. A menudo, este "espacio máximo" es mucho mayor que el necesario para la operación en cuestión. Dado que los diseñadores de sistemas quieren utilizar la menor superficie posible, el robot está programado para ceñirse a un "espacio limitado" mucho más pequeño. Luego se utilizan vallas, cortinas de luz y escáneres de alcance para definir un "espacio protegido" alrededor del espacio limitado al que las personas no deben entrar.
Sin embargo, prácticamente siempre se necesita una distancia de seguridad entre el espacio limitado y el espacio protegido. ¿Por qué? Porque el robot necesita tiempo para reducir la velocidad y detenerse por completo cuando detecta que una persona ingresa al espacio protegido (mediante una barrera de luz, un escáner, una cámara o un interruptor de puerta).
Esta infografía ilustra cómo considerar críticamente las distancias de seguridad para robots industriales. Descubra la importancia de las vallas de protección, cómo ocurren los accidentes y cuándo las vallas podrían no ser la única solución. Descubra las consideraciones clave para mantener la seguridad de las personas cerca de los robots.